





SLAM地下空间测图这么火,你选对了吗?
一、背景概述

在科技创新技术改革的背景下,我们测绘技术发展也同样在不断进化,行业处于“问科技要创新,问技术要效率”的变革时期;地下空间测量工作的特殊性使得激光SLAM技术作为一种新型测绘技术手段备受青睐,SLAM技术凭借的是其独特的技术优势(无需GPS移动测量)可以完成高精度高效率的三维建图工作可谓恰逢其会。
于是,众多激光SLAM产品喷薄而出,似乎都想要抓住这一风口起飞,大有曾经无人机百家齐放的意思,而带给市场更多选择的同时,也让不了解情况的用户犹豫不定或误入歧途。今天我们来为您解惑地下空间该选择什么样的SLAM产品。
二、什么是SLAM技术
SLAM 是同步定位与地图构建 (Simultaneous Localization And Mapping) 的缩写。SLAM被定义为解决机器人从未知环境的未知地点出发,在运动过程中通过重复观测到的地图特征(比如,墙角,柱子等)定位自身位置和姿态,再根据自身位置增量式的构建地图,从而达到同时定位和地图构建目的。
大体上而言,SLAM包含了:感知、定位、建图这三个过程。
感知——机器人能够通过传感器获取周围的环境信息。
定位——通过传感器获取的当前和历史信息,推测出自身的位置和姿态。
建图——根据自身的位姿以及传感器获取的信息,描绘出自身所处环境的样貌。
SLAM技术特点:
常见的测角、测距、测高、定向、定位和绘图通常是通过多余观测或重复测量来保证精度和稳定性,劳动强度大、作业时间长。而长期以来用测角、测距、测水准为主体的常规地面定位技术,正逐步被以一次性确定三维坐标的、高速度、高效率、高精度的GPS技术所代替,同时定位范围已从陆地和近海扩展到海洋和宇宙空间,定位方法已从静态扩展到动态。
但目前地面移动测量系统均需要依赖于全球卫星导航系统(global navigation satellite system,GNSS)和惯性导航系统,只能用于室外环境。然而,由于室内和地下空间等环境中没有GPS信号,因此,传统的移动测量系统无法正常工作。固定式激光扫描可以用于室内室外的环境,但是复杂场景需要大量换站,然后进行点云拼接,数据获取的效率十分低下。
SLAM技术优势:
由于SLAM技术在测绘领域中的应用降低了测量复杂性,不需要大量标记地物点,不需要GPS信号,适用于在室内室外场景,对工作环境又有极强的适应性,具体表现为:
(1) 外业数据采集速度极快,可快速获得所需点云数据,数据精度高。
(2) 内业点云预处理时间短,自动化程度高,基本不需要人工干预,短时间便能获得配准好的点云数据。
(3) 操作简单方便,无需换站,连续采集,具有连贯性,可实现室内外一体化扫描作业。

三、SLAM产品现状
基于SLAM技术的三维激光扫描仪通常包括硬件、软件两个部分;
硬件部分:与当前智能手机的发展相似,各个厂商通过相似性结构和相同的零部件使得SLAM扫描仪硬件趋同性极高,采用相同的激光传感器,360°旋转结构或双头背包结构,对标相同的性能参数指标;更有甚者,在产品命名方式上都沿用了当年手机的山寨路线。相似的外观、参数和命名也是迷惑众多用户的根源。
软件部分:SLAM算法依靠传感器数据来实现准确的位姿估计。
而想要达到较高的成果精度,在建图的过程中软件算法是非常重要的,这其中涉及了点云匹配、闭环检测等过程。当使用激光雷达作为传感器时,我们得到的是一组点云,需要帧到帧配准来获得帧之间的相对转换。注册步骤是一个非常具有挑战性的问题,目前大多数的配准方法都是基于迭代最近点(ICP)配准。ICP算法迭代对两组点进行对齐,每次迭代首先找到最好的点对点对应,然后计算所有对应点对之间的刚性变换。ICP对于点云配准效果很好,但在处理场景级点云配准时并不是最好的。它只利用点向距离来找到优化的对应关系,全局信息常常被忽略,这就造成数据成果在小范围内没有问题,而数据整体的累积误差常常超限,这也是大多数不成熟产品的通病。
四、实际测试

天宝X7、GeoSLAM Zeb Horizon、某品牌背包扫描仪
1、选择相同的地下车库环境进行SLAM扫描测试
2、对同一车库场景采用不同的作业方式进行扫描(分段扫描+整体扫描)
1、使用相同SLAM产品两次扫描数据内部比对,检查精度一致性
2、使用SLAM数据与天宝X7进行比对,检查精度
3、对比过程均采用Realworks软件进行数据自动匹配并进行剖面检查

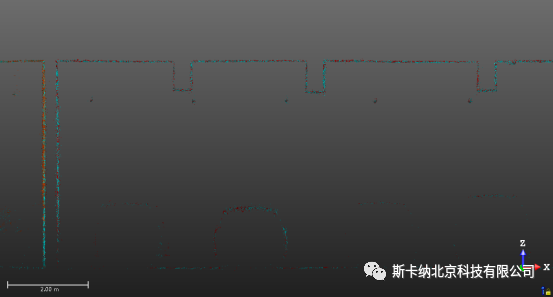

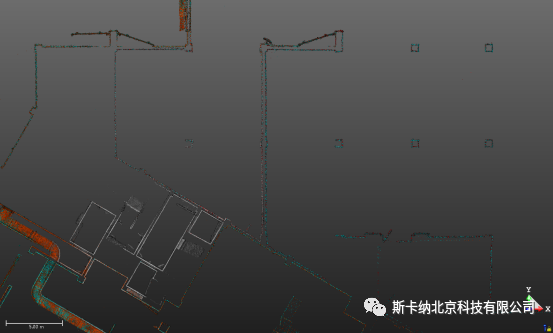
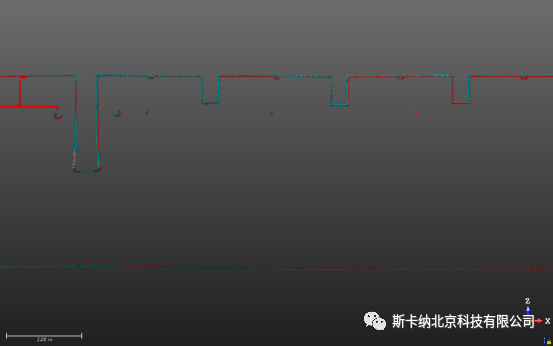
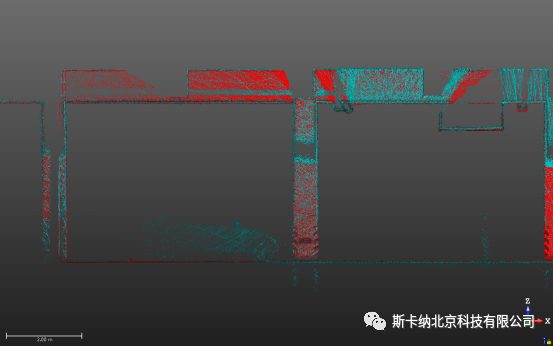
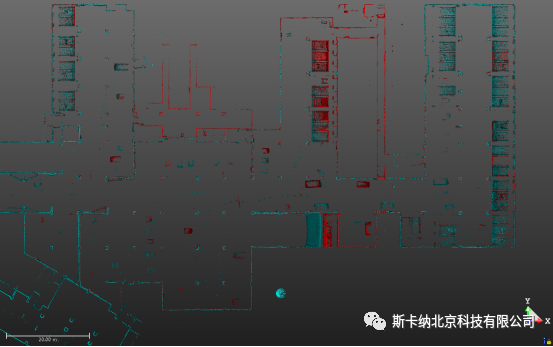
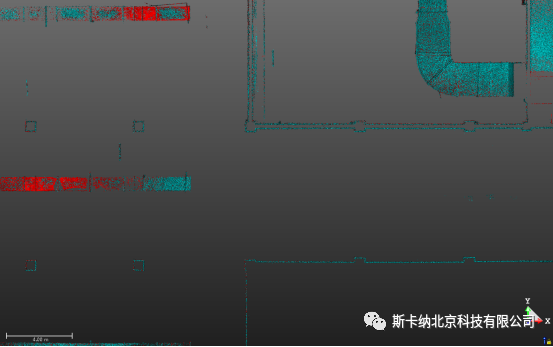
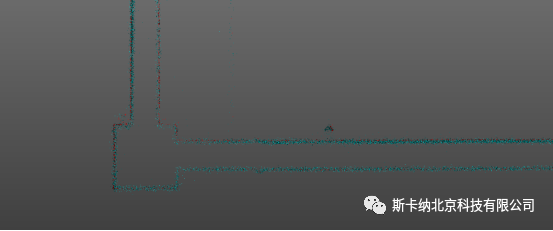
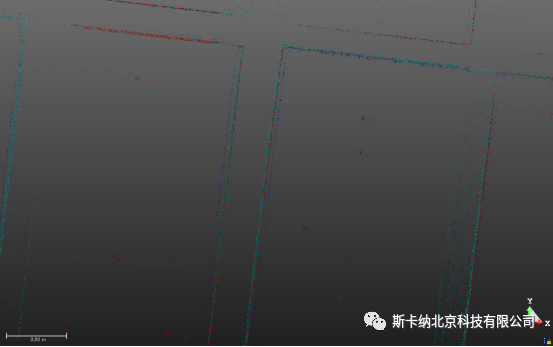
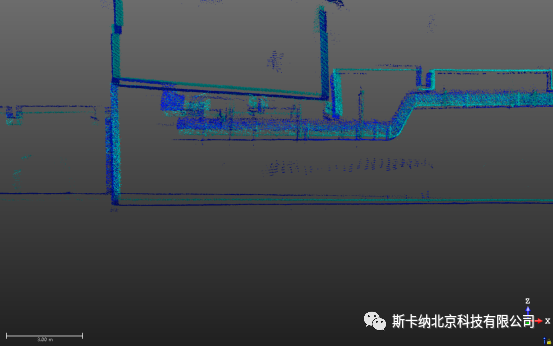
3、某品牌SLAM与天宝X7对比
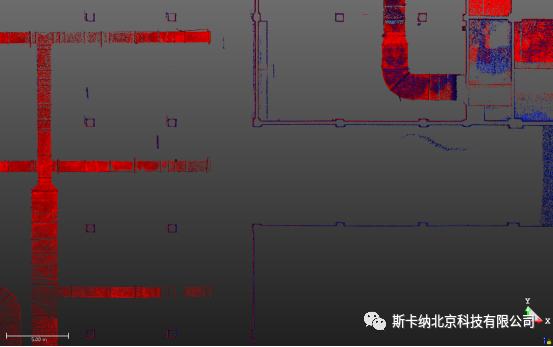
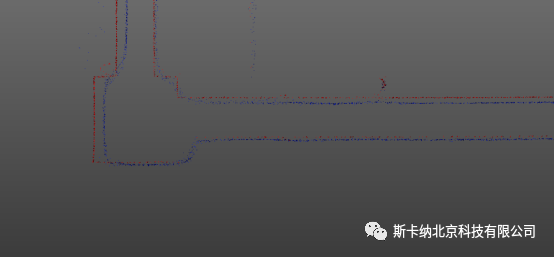


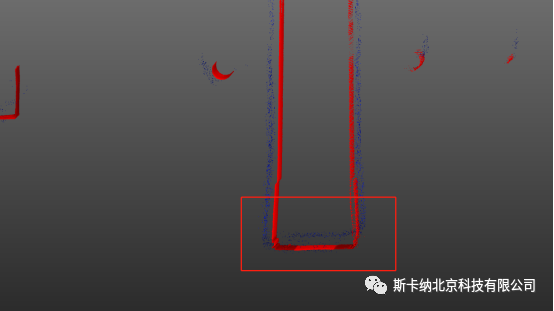
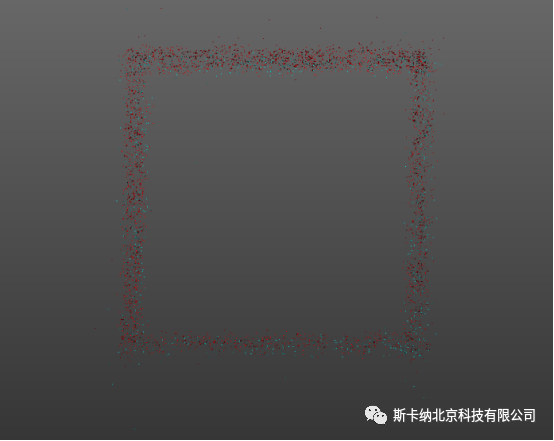
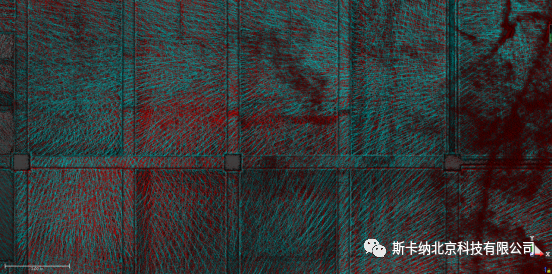
经验证,某品牌SLAM数据与天宝X7经Realworks匹配,检核发现如下问题:
五、总结与建议:
当前,市场上SLAM产品参差不齐,部分产品采用不成熟的开源算法靠低价、营销等进行初期推广。面对地下空间、矿山、室内环境等空间狭窄、特征不足的作业场景时,这类产品容易出现数据错位,分层,特征变形等情况。当您在选择产品时,可采用上述方法进行验证:
·多次扫描进行内部一致性验证,无法满足自身数据一致的数据不可靠;
·采用更高精度的三维数据基准进行比对往往比二位控制点检测更加准确,数据不易作假。
在硬件趋同的今天,SLAM技术的核心体现在软件算法层面,GeoSLAM经过十余年研发和算法迭代,具备可靠的数据成果精度表现和完整的解决方案,用数据,用精度,用服务诠释产品价值!

- 2019-10-23
- 2020-06-16
- 2024-11-12
- 2019-12-31
- 2020-04-01
- 2020-03-03

