






GeoSLAM ZEB HORIZON三维数字化电力服务方案
前言
我国电网建设经历了高速发展阶段,蓬勃发展的先进输电技术是真正的“电力高速公路”,在能源互联网发展大势中占有举足轻重的地位。目前,输电线路规模已跃居世界首位。随着线路里程不断增加,人均巡检长度逐年增加,三维激光扫描作为一种可以快速获取目标的三维空间坐标,并以点云的形式展现出物体表面真实结构的新型测绘技术,已经广泛应用电力线数字化、变电数字化以及电力巡检中。国家电网、南方电网等电力企业,在传统人工巡检方式的基础上,积极探索新型电力巡检和电力数字化方式,引入最新型GeoSLAM激光雷达技术,大大提高了巡检效率。
GeoSLAM是一款室内外一体化的移动激光雷达扫描系统,结合激光雷达和同步定位与地图构建(SLAM)技术,无需GPS即可实时获取高精度点云数据。轻巧的设计使得GeoSLAM既可以手持或背包使用,也可搭载于飞机和汽车等平台进行使用。
GeoSLAM可应用于变电站、电力线、换流站、杆塔等的快速三维建模与数据更新。


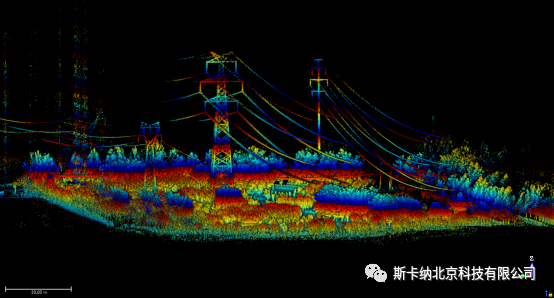
某电力线扫描成果


某变电站三维扫描和数字化成果

室内细节和电力设施

三维数字化
SLAM基本原理


SLAM技术特点
目前,现有的地面移动测量系统通常是基于车载的移动测量系统的,但目前地面移动测量系统均需要依赖于全球卫星导航系统(GNSS)和惯性导航系统,只能用于室外环境。然而, 由于室内和地下空间等环境中没有 GNSS 信号,因此,传统的移动测量系统无法正常工作。固定式激光扫描可以用于室内室外的环境,但是复杂场景需要大量换站,然后进行点云拼接, 数据获取的效率十分低下。然而,即时定位与地图构建(SLAM)技术在移动测绘方面具有较好的应用,不依托 GNSS 信号,能够对室内和室外的地面水平环境进行地图构建和环境建模。因此,SLAM 技术在测绘领域中的应用降低了测量复杂性,不需要大量标记地物点,不需要GPS 信号,适用于在室内室外场景,对于解决传统测绘中的定位及场景重建问题具有广阔的前景。
由于 SLAM 技术无需 GNSS 信号,对工作环境又有极强的适应性,基于 SLAM 技术的移动测量系统在多个测绘领域发挥作用,具体表现为:
(1)外业数据采集速度极快,可快速获得所需点云数据,数据精度高。
(2)内业点云预处理时间短,自动化程度高,基本不需要人工干预,短时间便能获得配准好的点云数据。
(3)操作简单方便,无需换站,连续采集,具有连贯性,可实现室内外一体化扫描作业。
(4) SLAM 技术的测绘移动测量扫描仪在任意环境中长时间工作故障率低,对于精度要求较高的重点区域,可与固定测站式三维激光系统配合使用,既能保证精度,又能保证效率。

无论是室外或者室内扫描环境,只要扫描环境结构特征越明显SLAM扫描结果越准确
GeoSLAM 系列产品优势
①适用性:不需要大量标记地物点,适用于在室内室外场景,对工作环境有极强适应性。
②高效率:100Hz线扫描速度,可在几分钟内快速获取精细的三维空间点云数据。
③自动化:自动化程度高,无需人工干预,短时间便能获得已配准好的点云数据。
④高精度:惯导系统与SLAM算法相结合,无需GPS辅助定位便可以进行高精度的点云自动匹配。
⑤多平台:激光头旋转扫描,可以手持,背包,船载,车载,探测车载及无人机载等多平台搭载。

GeoSLAM ZEB HORIZON

GeoSLAM ZEB Horizon 3D 系统

一个背包搞定所有主配件

数据预处理软件 GeoSLAM HUB 特性
外业数据采集

一个书包装下整机系统

静止开机 30 秒即可进入数据采集
数据内业处理
原始数据解算

在预处理软件 Hub 中查看点云数据的整体 3D 效果,也可以以 2D 效果图来进行显示。当同步影像与点云相匹配之后,点云数据还能够以 RGB 真彩色来显示,与最终成果图对比起来会显得更加的直观有效。

M600 搭载ZEB Horizon 手动飞行,电力线上空10 m,真彩色扫描结果
总结
随着三维激光扫描技术的普及与发展,人们已经感受到它与传统测量仪器之间的天差地别。利用三维激光扫描设备获取的点云数据可以实现数字化电力附属物结构重建,获得精确的弧垂、塔高、塔基地形等数据,为数字化巡线提供了宝贵的资料。这种作业方式不仅节约了时间,提高了作业效率,也大大减少了人力、物力的投入。目前三维激光扫描设备样式繁多,区别于对架站场地要求更高的地面式激光扫描仪,以及难以穿透茂盛树冠的机载激光雷达。Geoslam ZEB Horizon手持式扫描仪作业方式灵活,单人即可完成扫描作业,能够快速完整地获取变电站内外、塔基、供电线、高压线的三维激光点云数据,拥有着机载雷达与地面扫描仪不可比拟的优势。亦可将GeoSLAM地面设备采集的点云数据与GeoSLAM机载雷达数据进行拼接匹配,优势互补,以获得更加全面精确的树木点云数据。综上,使用Geoslam ZEB Horizon可极大的提升电力附属物三维数字化工作效率。


